
Page 47 - 能量採集技術開啟醫療應用新局
P. 47
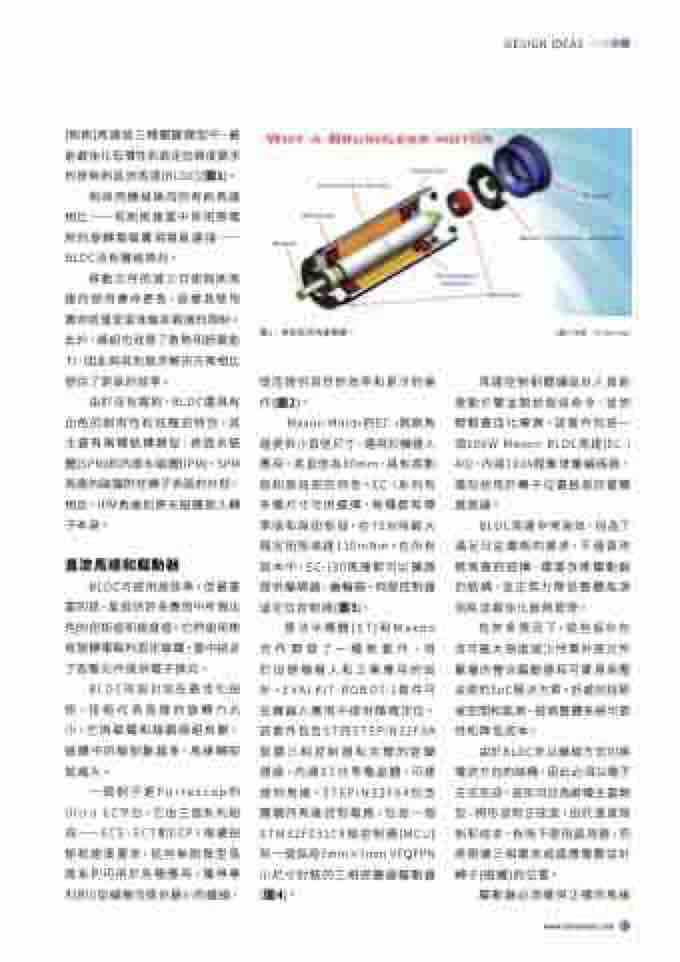
(無刷)馬達這三種關鍵類型中,最 能最佳化低慣性和高定位精度要求 的是無刷直流馬達(BLDC)(圖1)。
由於沒有電刷,BLDC還具有 出色的耐用性和低雜訊特性。其 主要有兩種結構類型:表面永磁 體(SPM)和內部永磁體(IPM)。SPM 馬達的磁鐵附在轉子表面的外部。 相反,IPM馬達則將永磁體嵌入轉 子 本 身。
作(圖2)。
Maxon Motor的EC-i無刷馬
馬達控制韌體讓設計人員能 啟動引擎並開始發送命令,從而 輕鬆最佳化專案。該套件包括一 個100W Maxon BLDC馬達(EC-i 40),內建1024脈衝增量編碼器, 還包括用於轉子位置檢測的霍爾 感測器。
直流馬達和驅動器
達提供小直徑尺寸,適用於機器人 應用。其直徑為30mm,具有高動 態和高扭矩的特性。EC-i系列有 多種尺寸可供選擇,每種都有標 準版和高扭矩版,在75W時最大 額定扭矩高達110mNm。在所有 版本中,EC-i30馬達都可以擴展 提供編碼器、齒輪箱、伺服控制器 或定位控制器(圖3)。
BLDC馬達非常高效,但為了 滿足日益嚴格的要求,不僅要改 進馬達的結構,還要改進驅動器 的結構,並正努力降低整體能源 消耗並最佳化散熱管理。
BLDC可提供高效率,但最重 要的是,能提供許多應用中所需出 色的扭矩值和速度值。它們使用帶 有旋轉電樞的固定磁鐵,當中結合 了各種元件提供電子換向。
意法半導體(ST)和Maxon 合作開發了一種新套件,用 於加速機器人和工業應用的設 計。EVALKIT-ROBOT-1套件可 在機器人應用中提供精確定位。 該套件包含ST的STSPIN32F0A 智慧三相控制器和完整的逆變 器級,內建ST功率電晶體,可連 接到馬達。STSPIN32F0A包含 關鍵的馬達控制電路,包括一個 STM32F031C6微控制器(MCU) 和一個採用7mm×7mm VFQFPN 小尺寸封裝的三相逆變器驅動器 (圖4)。
在許多情況下,這些設計包 含可最大限度減少所需外部元件 數量的整合驅動器和可實現高整 合度的SoC解決方案。好處包括節 省空間和能源、提高整體系統可靠 性和降低成本。
BLDC的設計旨在最佳化扭 矩,扭矩代表馬達的旋轉力大 小,它與磁鐵和線圈繞組有關。 磁體中的極對數越多,馬達轉矩 就越大。
由於BLDC未以機械方式切換 電流方向的結構,因此必須以電子 方式完成。波形可分為兩種主要類 型:梯形波和正弦波。由於溫度限 制和成本,有時不使用感測器,而 是根據三相電流或感應電壓估計 轉子(磁鐵)的位置。
一個例子是Portescap的 Ultra EC平台,它由三個系列組 成——ECS、ECT和ECP。根據扭 矩和速度要求,這些無刷微型馬 達系列可用於各種應用。獲得專 利的U型線圈可提供最小的鐵損,
驅動器必須確保正確的馬達
DESIGN IDEAS
與採用機械換向的有刷馬達 相比——有刷馬達當中採用帶電 刷的旋轉電樞實現電氣連接—— BLDC沒有機械換向。
移動元件的減少可使無刷馬 達的使用壽命更長,這樣其使用 壽命就僅受滾珠軸承磨損的限制。 此外,繞組也改善了散熱和超載能 力,因此與其他直流解決方案相比 提供了更高的效率。
圖1:無刷直流馬達圖解。 從而提供良好的效率和更冷的操
(圖片來源:Portescap)
www.edntaiwan.com 45
