
Page 46 - 能量採集技術開啟醫療應用新局
P. 46
DESIGN IDEAS
影響薄膜可靠度的殘餘應力 分析
力,再經過後續CMP製程的研磨, 當局部有較大的應力集中時,極可 能發生剝離或破裂的現象,因此就 很需要了解其存在的殘留應力。
度位移量(Δ2θ)的分析應變手法, 搭配一個常用的數學模式(sin2ψ method),即可求出殘餘應力。
當Low-k與金屬膜材料重複 堆疊且經過多次不同的製程條件 後,就需確認薄膜受到的應力是 否改變;尤其在薄膜厚度不同,堆 疊薄膜密度的差異,就會產生內應
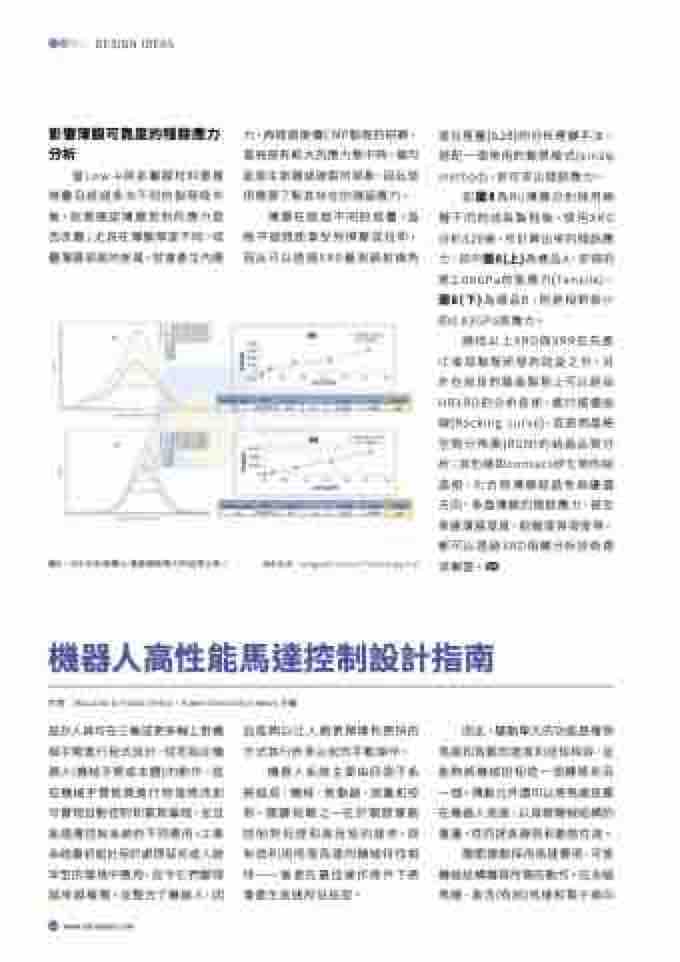
薄膜在經過不同的堆疊,晶 格平面間距會受到擠壓或拉伸, 因此可以透過XRD量測繞射峰角
如圖8為Ru薄膜分別採用兩 種不同的成長製程後,使用XRD 分析Δ2θ後,所計算出來的殘餘應 力,其中圖8(上)為樣品A,求得的 是2.06GPa的張應力(Tensile), 圖8(下)為樣品B,則是相對較小 的0.83GPa張應力。
圖8:XRD分析兩種Ru薄膜殘餘應力的結果比較。
(資料來源:Integrated Service Technology, Inc)
總括以上XRD與XRR在先進 IC後段製程研發的助益之外,另 外在前段的磊晶製程上可以經由 HRXRD的分析技術,進行搖擺曲 線(Rocking curve),或是倒晶格 空間分佈圖(RSM)的結晶品質分 析;其他諸如contact矽化物的結 晶相、化合物薄膜結晶性與優選 方向、多晶薄膜的殘餘應力,甚至 多層薄膜厚度、粗糙度與密度等, 都可以透過XRD相關分析技術尋 求解答。
機器人高性能馬達控制設計指南
作者:Maurizio Di Paolo Emilio,Power Electronics News 主編
設計人員可在三軸或更多軸上對機 械手臂進行程式設計,從而指定機 器人(機械手臂或本體)的動作。這 些機械手臂無需進行物理修改即 可實現自動控制和重新編程,並且 能適應控制系統的不同應用。工業 系統最初設計用於處理惡劣或人跡 罕至的環境中應用,如今它們變得 越來越複雜,並整合了機器人,因
44 www.edntaiwan.com
此能夠以比人類更精確和更快的 方式執行許多以前的手動操作。
因此,驅動單元的功能是確保 馬達和負載的速度和扭矩相容,並 能夠將機械扭矩從一個轉移到另 一個。傳動元件還可以將馬達放置 在機器人底座,以減輕機械結構的 重量,從而提高靜態和動態性能。
機器人系統主要由四個子系 統組成:機械、致動器、測量和控 制。關鍵挑戰之一在於關節運動 控制對低速和高扭矩的要求,與 有效利用伺服馬達的機械特性相 悖——後者在最佳操作條件下將 會產生高速和低扭矩。
關節運動採用馬達實現,可使 機械結構獲得所需的動作。在永磁 馬達、直流(有刷)馬達和電子換向
