
Page 49 - 能量採集技術開啟醫療應用新局
P. 49
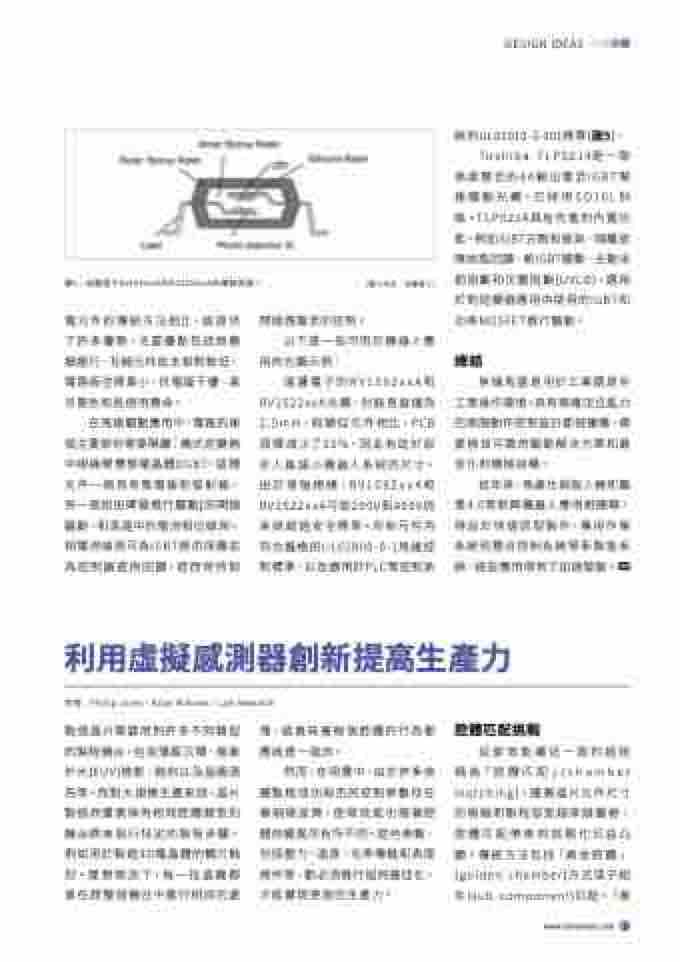
圖5:瑞薩電子RV1S92xxA和RV1S22xxA的橫截面圖。
(圖片來源:瑞薩電子)
統的UL61010-2-201標準(圖5)。 Toshiba TLP5214是一款 高度整合的4A輸出電流IGBT閘 極 驅 動 光 耦,它 採 用 S O 1 6 L 封 裝。TLP5214具有先進的內置功 能,例如IGBT去飽和檢測、隔離故 障狀態回饋、軟IGBT關斷、主動米 勒阻斷和欠壓阻斷(UVLO),適用 於對逆變器應用中使用的IGBT和
電元件的傳統方法相比,這提供 了許多優勢。主要優點包括無磨 損運行、互補元件成本相對較低、 電路板空間最小、抗電磁干擾、高 可靠性和長使用壽命。
閉迴路電流的控制。 以下是一些可用於機器人應
功率MOSFET進行驅動。
在馬達驅動應用中,電路的兩 個主要部份需要隔離:橋式逆變器 中絕緣閘雙極電晶體(IGBT,這種 元件一側具有集電極和發射極, 另一側則由閘極進行驅動)的閘極 驅動,和馬達中的電流相位檢測。 相電流檢測可為IGBT提供保護並 為控制器提供回饋,從而保持對
RV1S22xxA光耦,封裝長度僅為 2.5mm,與類似元件相比,PCB 面積減少了35%,因此有助於設 計人員減小機器人系統的尺寸。 由於增強絕緣,RV1S92xxA和 RV1S22xxA可使200V和400V的 系統超過安全標準。所有元件均 符合嚴格的UL61800-5-1馬達控 制標準,以及適用於PLC等控制系
無論馬達是用於工業還是非 工業操作環境,具有精確定位能力 的高階動作控制設計都很複雜,需 要極其可靠的驅動解決方案和最 佳化的機械結構。
用的光耦示例: 瑞薩電子的RV1S92xxA和
總結
利用虛擬感測器創新提高生產力
作者:Phillip Jones、Brian Williams,Lam Research
DESIGN IDEAS
近年來,馬達也與無人機和農 業4.0等新興機器人應用相關聯, 得益於快速原型製作、專用作業 系統和整合控制系統等新製造系 統,這些應用得到了加速發展。
製造晶片需要用到許多不同類型 理,這意味著每個腔體的行為都
腔體匹配挑戰
的製程機台,包括薄膜沉積、極紫 外光(EUV)微影、蝕刻以及晶圓清 洗等。而對大規模生產來說,晶片 製造商還需採用相同腔體類型的 機台群來執行特定的製程步驟, 例如用於製造3D電晶體的鰭片蝕 刻。理想情況下,每一批晶圓都 會在跨整個機台中進行相同的處
應該是一致的。 然而,在現實中,由於許多攸
促使效能趨近一致的過程 稱為「腔體匹配」(chamber matching)。隨著晶片元件尺寸 的微縮和製程容差越來越嚴格, 腔體匹配帶來的挑戰也日益凸 顯。傳統方法包括「黃金腔體」 (golden chamber)方式或子組 件(sub-component)匹配。「黃
關製程成功與否的控制參數存在 著細微差異,使得效能也隨著腔 體的變異而有所不同。這些參數, 包括壓力、溫度、功率傳輸和表面 條件等,都必須進行協同最佳化, 才能實現更高的生產力。
www.edntaiwan.com 47
