
Page 43 - CMOS影像感測器的元視覺:超越人眼看世界
P. 43
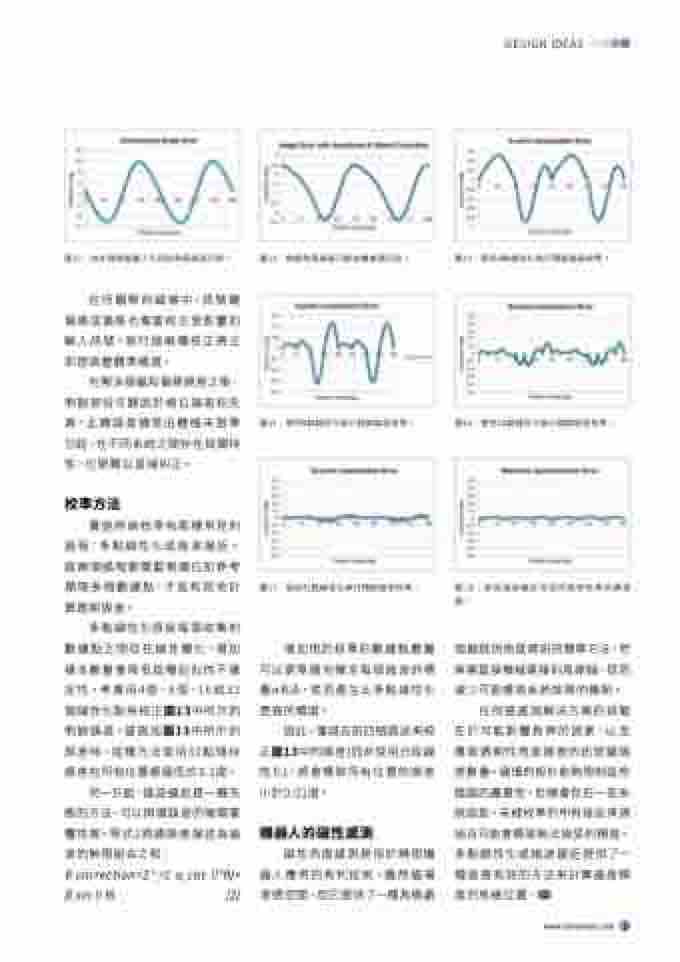
圖12:由非理想磁輸入引起的角度誤差示例。
圖13:剩餘角度誤差可能由機械源引起。
圖15:使用8點線性化執行殘餘誤差校準。
圖17:使用32點線性化執行殘餘誤差校準。
圖14:使用4點線性化執行殘餘誤差校準。
圖16:使用16點線性化執行殘餘誤差校準。
圖18:使用諧波逼近完成的誤差校準的廣視 圖。
在所觀察的磁場中,訊號鏈 偏移或偏移也需要校正受影響的 輸入訊號。執行這兩種校正將立 即提高整體準確度。
在解決振幅和偏移誤差之後, 剩餘部份可歸因於相位誤差和失 真。此類誤差通常由機械未對準 引起,在不同系統之間存在其獨特 性,也更難以直接糾正。
校準方法
實施終端校準有兩種常見的 過程:多點線性化或諧波逼近。 這兩個過程都需要根據已知參考 擷取多個數據點,才能有效地計 算週期誤差。
多點線性化假設每個收集的 數據點之間存在線性變化。增加 樣本數量會降低這種近似的不確 定性。考慮用4個、8個、16或32 個線性化點來校正圖13中所示的 剩餘誤差。當施加圖13中所示的 誤差時,這種方法使用32點殘存 誤差在所有位置都遠低於0.1度。
增加用於校準的數據點數量 可以更準確地確定每個諧波的標 量α和β,從而產生比多點線性化 更高的精度。
理器提供角度資訊的簡單方法,而 無需直接機械連接到馬達軸,從而 減少可能導致系統故障的機制。
另一方面,諧波逼近是一種先 進的方法,可以辨識誤差的循環重 覆性質。等式2將總誤差描述為諧 波的無限組合之和:
因此,僅減去前四個諧波來校 正圖13中的誤差(而非使用分段線 性化),將會導致所有位置的誤差 小於0.01度。
任何磁感測解決方案的挑戰 在於可能影響對齊的因素,以及 導致週期性角度誤差的訊號鏈誤 差數量。謹慎的設計能夠限制這些 錯誤的嚴重性,但總會存在一些系 統容差。未經校準的所有這些來源 組合可能會導致無法接受的精度。 多點線性化或諧波逼近提供了一 種直接有效的方法來計算最高精 度的馬達位置。
機器人的磁性感測
DESIGN IDEAS
θ correction=∑ni=1 αi cos (i*θ)+ βi sin (i θ) (2)
磁性角度感測是用於精密機 器人應用的有利技術。雖然磁場 滲透空間,但它提供了一種為微處
www.edntaiwan.com 41
