
Page 41 - CMOS影像感測器的元視覺:超越人眼看世界
P. 41
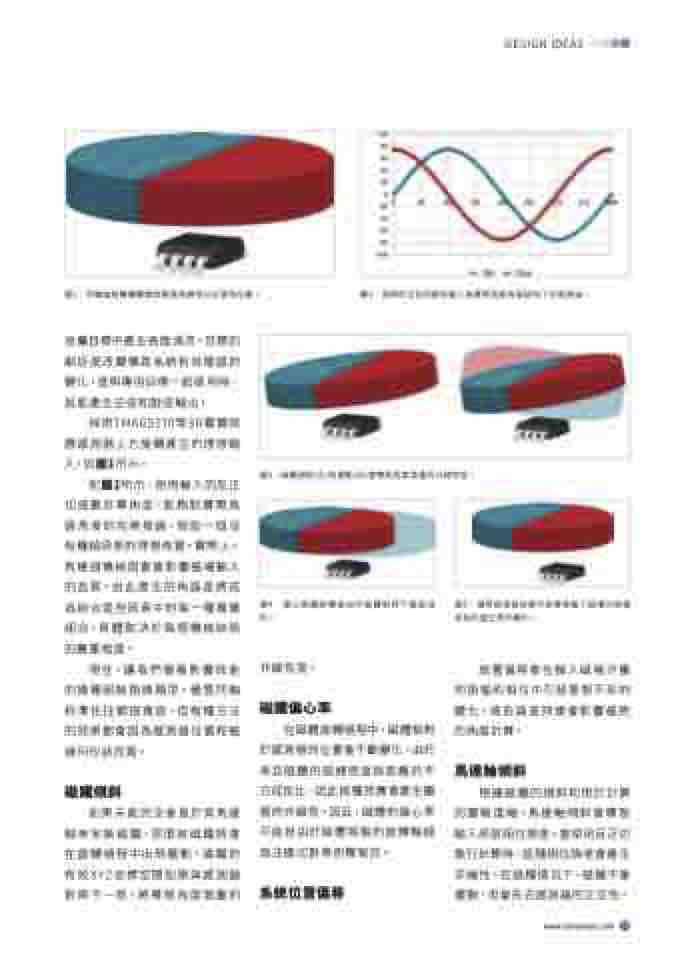
圖1:同軸磁旋轉讓霍爾效應感測器得以計算角位置。
圖2:理想的正弦和餘弦輸入為實際馬達角度提供了完美推論。
金屬目標中產生表面渦流。目標的 鄰近度改變導致系統有效電感的 變化,當與專用目標一起使用時, 就能產生正弦和餘弦輸出。
採用TMAG5170等3D霍爾效 應感測器上方旋轉產生的理想輸 入,如 圖 1 所 示。
圖3:磁鐵傾斜(左)和擺動(右)會導致角度測量的非線性度。
如圖2所示,使用輸入的反正 切函數計算角度,能夠對實際馬 達角度的完美推論,假設一個沒 有機械容差的理想佈置。實際上, 有幾個機械因素會影響磁場輸入 的品質。由此產生的角誤差將成 為結合這些因素中的每一種複雜 組合,具體取決於每個機械缺陷 的嚴重程度。
圖4:偏心磁體旋轉是由於磁體對齊不當造成 的。
非線性度。
在磁體旋轉過程中,磁體相對 於感測器的位置會不斷變化。由於 來自磁體的磁通密度與距離的平 方成反比,因此這種效應會產生顯 著的非線性。因此,磁體的偏心率 可能是由於磁體與軸的旋轉軸線 無法確切對準而導致的。
系統位置偏移
圖5:偏移感測器放置可能導致輸入磁場的振幅 和相位發生意外變化。
放置偏移會在輸入磁場分量 的振幅和相位中引發意想不到的 變化。這些誤差同樣會影響最終 的角度計算。
根據磁鐵的傾斜和用於計算 的靈敏度軸,馬達軸傾斜會導致 輸入訊號相位誤差。當使用反正切 進行計算時,這種相位誤差會產生 非線性。在這種情況下,磁鐵不會 擺動,但會失去感測器的正交性。
現在,讓我們看看影響效能 的幾種組裝錯誤類型。儘管同軸 校準往往都很寬容,但每種方法 的效果都會因為感測器位置和磁 幾何形狀而異。
磁鐵偏心率
磁鐵傾斜
馬達軸傾斜
如果未能完全垂直於其馬達 軸來安裝磁鐵,那麼該磁鐵將會 在旋轉過程中出現擺動。磁鐵的 有效XYZ坐標空間如果與感測器 對齊不一致,將導致角度測量的
DESIGN IDEAS
www.edntaiwan.com 39
