
Page 43 - 智慧家庭:為什麼‘Matter’很重要?
P. 43
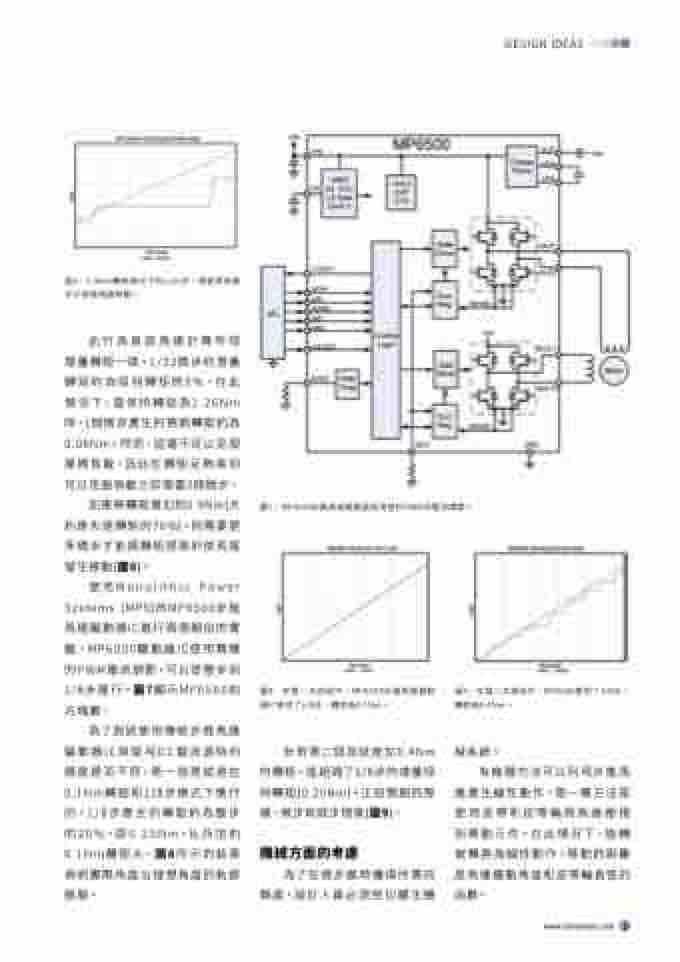
圖6:0.9Nm轉矩情況下的1/32步,需要更多微 步才能使馬達移動。
此行為與該馬達計算所得 增量轉矩一致。1/32微步的增量 轉矩約為保持轉矩的5%。在此 情況下,當保持轉矩為1.26Nm 時,1個微步產生的預期轉矩約為 0.06Nm。然而,這還不足以克服 摩擦負載,因此在轉矩足夠高到 可以克服負載之前需要2個微步。
如果將轉矩增加到0.9Nm(大 約是失速轉矩的70%),則需要更 多微步才能將轉矩提高到使馬達 發生移動(圖6)。
圖7:MP6500步進馬達驅動器採用基於PWM的電流調節。
DESIGN IDEAS
使用Monolithic Power Systems (MPS)的MP6500步進 馬達驅動器IC進行兩個類似的實 驗。MP6500驅動器IC使用精確 的PWM電流調節,可以從整步到 1/8步運行。圖7顯示MP6500的 方塊圖。
圖8:在第一次測試中,MP6500步進馬達驅動 器IC使用了1/8步,轉矩為0.1Nm。
針對第二個測試施加0.4Nm 的轉矩。這超過了1/8步的增量保 持轉矩(0.25Nm)。正如預期的那 樣,微步有跳步現象(圖9)。
圖9:在第二次測試中,MP6500使用了1/8步, 轉矩為0.4Nm。
為了測試使用傳統步進馬達 驅動器IC與使用DC電流源時的 精度是否不同,第一個測試是在 0.1Nm轉矩和1/8步模式下進行 的。1/8步產生的轉矩約為整步 的20%,即0.25Nm,比所加的 0.1Nm轉矩大。圖8所示的結果 表明實際角度沿理想角度的軌跡 進展。
械系統。 有幾種方法可以利用步進馬
機械方面的考慮
達產生線性動作。第一種方法是 使用皮帶和皮帶輪將馬達連接 到移動元件。在此情況下,旋轉 被轉換為線性動作。移動的距離 是馬達運動角度和皮帶輪直徑的 函數。
為了在微步進時獲得所需的 精度,設計人員必須密切關注機
www.edntaiwan.com 41
