
Page 42 - 智慧家庭:為什麼‘Matter’很重要?
P. 42
步進馬達轉矩
DESIGN IDEAS
面影響。 在微步進中有幾個角度誤差
來源。一個是馬達本身的缺陷—— 機械和磁性——因為馬達沒有完 美的正弦電流到位置傳遞函數。 即使向馬達施加完美的正弦和餘 弦電流,動作也不是完美的線性。
另一個誤差來源是步進馬達 控制器的電流調節精度。典型的 步進馬達IC可精確到全幅(full- scale)電流的5%。此外,兩個通 道之間的電流調節搭配可能並不 完美。這些不準確性的結果降低 了定位精度。
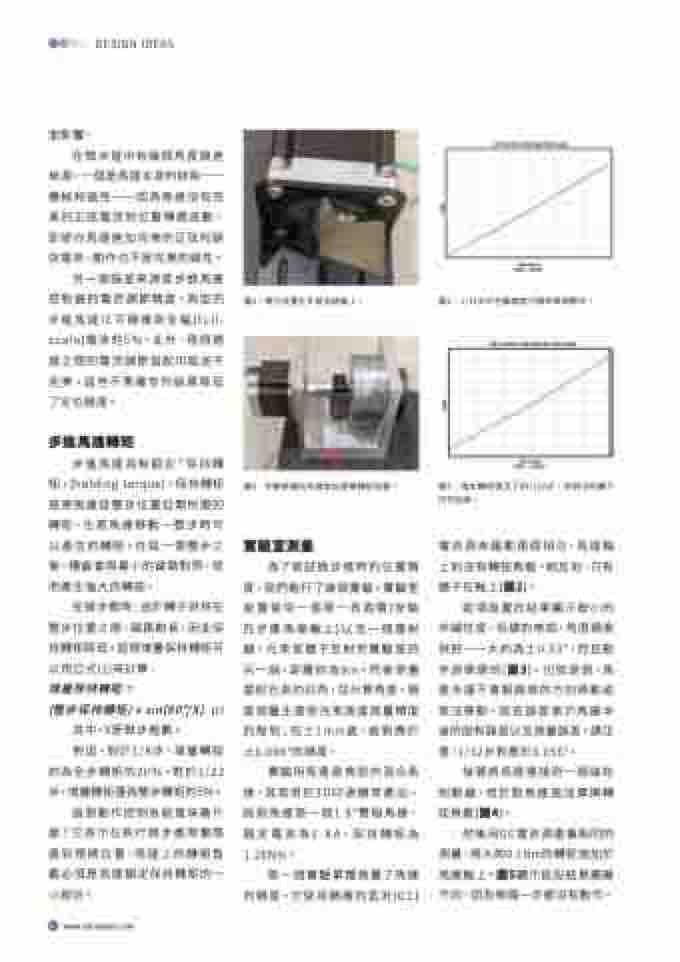
圖2:鏡子放置在步進馬達軸上。
圖4:制動裝置向馬達施加摩擦轉矩負載。
為了測試微步進時的位置精 度,我們進行了幾個實驗。實驗室 設置使用一個第一表面鏡(安裝 在步進馬達軸上)以及一個雷射 器。光束從鏡子反射到實驗室的 另一端,距離約為9m。然後測量 雷射光束的仰角,並計算角度。精 度測量主要受光束高度測量精度 的限制;在±1mm處,這對應於 ±0.006°的精度。
圖3:1/32步的空載精度可確保單調動作。
圖5:增加轉矩情況下的1/32步,表現出明顯不 同的結果。
步進馬達具有額定「保持轉 矩」(holding torque)。保持轉矩 是將馬達從整步位置拉開所需的 轉矩,也是馬達移動一整步時可 以產生的轉矩。在每一個整步之 後,槽齒會與最小的磁路對齊,從 而產生強大的轉矩。
實驗室測量
電流源來驅動兩個相位,馬達軸 上則沒有轉矩負載。相反地,只有 鏡子在軸上(圖2)。
在微步進時,由於轉子保持在 整步位置之間,磁路較長,因此保 持轉矩降低。這個增量保持轉矩可 以用公式(1)來計算: 增量保持轉矩 =
這項設置的結果顯示較小的 非線性度,但總的來說,角度精度 很好——大約為±0.03°,而且動 作是單調的(圖3)。也就是說,馬 達永遠不會朝錯誤的方向移動或 無法移動。這些誤差表示馬達本 身的固有誤差以及測量誤差。請注 意,1/32步對應於0.056°。
(整步保持轉矩) x sin(90°/X) (1)
其中,X是微步進數。
例如,對於1/8步,增量轉矩 約為全步轉矩的20%。對於1/32 步,增量轉矩僅為整步轉矩的5%。
實驗用馬達是典型的混合馬 達,其常用於3D印表機等產品。 這款馬達是一個1.8°雙極馬達, 額定電流為2.8A,保持轉矩為 1.26Nm。
接著將馬達連接到一個磁粒 制動器,用於對馬達施加摩擦轉 矩負載(圖4)。
這對動作控制系統意味著什 麼?它表示在執行微步進時實際 達到預期位置,馬達上的轉矩負 載必須是馬達額定保持轉矩的一 小部份。
第一個實驗單獨測量了馬達 的精度。它使用精確的直流(DC)
然後用DC電流源重複相同的 測量,將大約0.1Nm的轉矩施加於 馬達軸上。圖5顯示這些結果顯著 不同,因為每隔一步都沒有動作。
40 www.edntaiwan.com
